김준하 디든로보틱스 대표는 1일 대구 엑스코에서 열린 ‘2026 제41회 제어·로봇·시스템학회 학술대회(ICROS 2026)’ 초청강연에서 “로봇을 쓰는 이유는 사람이 들어가면 안 되는 위험한 영역이거나, 사람보다 일을 잘할 때”라며 조선소, 선박 운항, 건설, 정유·화학 공장을 자동화가 필요한 대표 현장으로 꼽았다.
|

김 대표는 “조선소는 환경이 척박하고 장애물이 높으며 고소 작업이 필요한 경우가 많다. 더 이상 사람들이 들어가고 싶지 않아 하는 공간”이라며 “자동화를 많이 해야 한다고 말하는 분야인데도 실제 자동화가 잘 이뤄지지 않았다”라고 설명했다.
그는 고가 범용 휴머노이드보다 현장 특화 로봇이 산업 적용에 유리하다고 봤다. 김 대표는 “아틀라스나 피규어 같은 휴머노이드를 활용해 보려고도 했지만 비용 대비 효율(ROI)이 나오지 않는다”라며 “손만 수천만원 수준이고 전신은 3억원을 넘어간다”고 말했다.
디든로보틱스는 이 간극을 현장 맞춤형 로봇으로 풀겠다는 전략이다. 현재 개발 중인 로봇은 사족보행형 ‘디든 스파이더’, 이족보행형 ‘워커’, 고하중 작업용 ‘디든 휴머노이드’ 세 종류다.
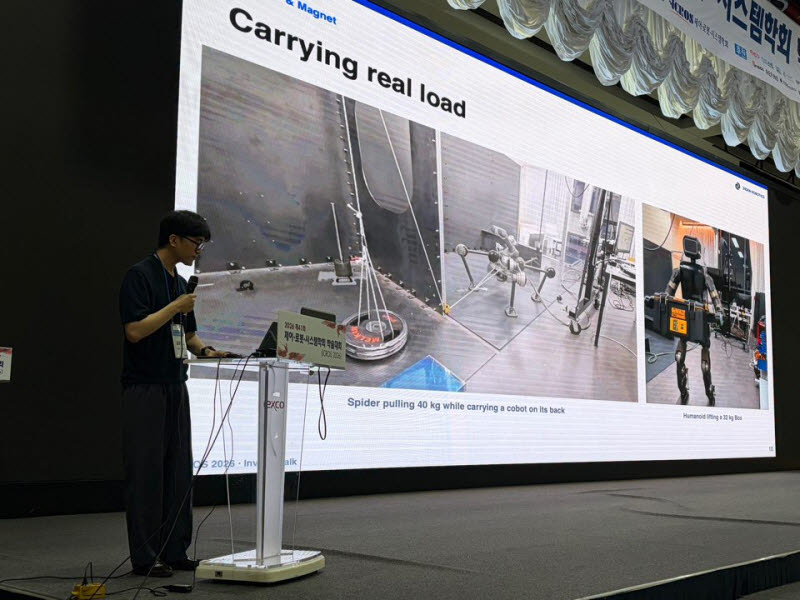
대표 플랫폼인 디든 스파이더는 선박 제조 공정을 겨냥한 거미형 로봇이다. 철제 구조물에 붙을 수 있는 자석 발을 갖췄고, 상부에 용접 로봇을 얹어 작업할 수 있도록 설계했다.
김 대표는 “디든 스파이더는 선박 제조 공정에 활용되는 것을 목표로 한다”며 “철제 환경에 들러붙을 수 있는 자석 발이 있고, 그 위에 용접 로봇을 얹어 용접도 진행할 수 있게 만들고 있다”고 말했다.
조선소 협소 공간을 겨냥한 이족보행 로봇 ‘워커’도 소개했다. 김 대표는 “사족보행 로봇이 들어가기에는 너무 좁거나 아예 들어갈 수 없는 환경이 있고, 현재는 사람이 들어가 작업하고 있다”며 “사람이 들어갈 수 있는 정도면 휴머노이드도 들어갈 수 있겠다고 봤다”고 설명했다.
|
디든 휴머노이드의 양산형 개발 계획도 처음 공개했다. 김 대표는 “양산화된 버전으로 완성도 높은 형태의 개발에 돌입했다”라며 “9월 말에서 10월쯤 가공품을 받아 조립하고, 11월 초 공개하는 것을 목표로 하고 있다”고 설명했다.
시제품은 이미 일부 테스트가 진행 중이다. 김 대표는 “디든 휴머노이드는 키가 약 175cm에 자중 약 90kg 체격으로, 32kg 물체를 들고 보행하는 데 성공했다”며 “전 세계 최상위권 수치”라고 강조했다.
디든로보틱스가 산업현장용 로봇의 핵심으로 보는 기술은 액추에이터와 자석 발이다. 초기에는 저렴한 상용 모터를 적용하려 했지만 실제 성능과 내구성, 방진·방수 설계에서 한계를 느꼈고, 이후 자체 준직접구동(QDD) 액추에이터 개발로 방향을 틀었다.
현재는 감속기뿐 아니라 하우징, 모터, 보드, 품질검사 장비까지 내부적으로 구현하고 있다. 조선소 철제 구조물 환경에 대응하기 위해 전자영구자석 기반 자석 발도 적용했다.
김 대표는 향후 선박 운항 시장에서 게이지 확인, 밸브 조작, 배전반 스위치 조작 등에 파운데이션 모델을 활용할 계획이라고 밝혔다. 그는 “글로벌 톱티어 시각-언어-행동(VLA) 파운데이션 모델을 만드는 팀들과도 협업을 준비하고 있다”고 설명했다.
김 대표는 피지컬AI 로봇 상용화의 핵심을 현장 데이터와 재활용 가능한 요소기술로 봤다. 그는 “하나의 시장에 맞춘 기술만 만들다 보면 고착화될 수 있다”며 “현장에 최적화된 로봇을 빠르게 배치하고, 거기서 얻는 데이터를 다시 학습에 활용하는 선순환 구조를 만들고 있다”고 강조했다.